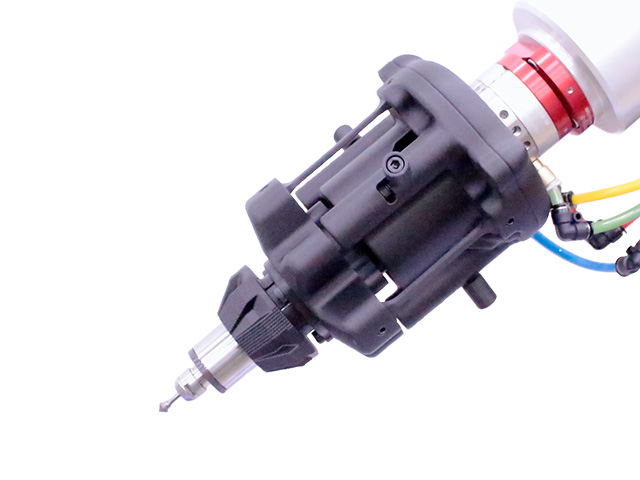
フローティング式バリ取りハンド
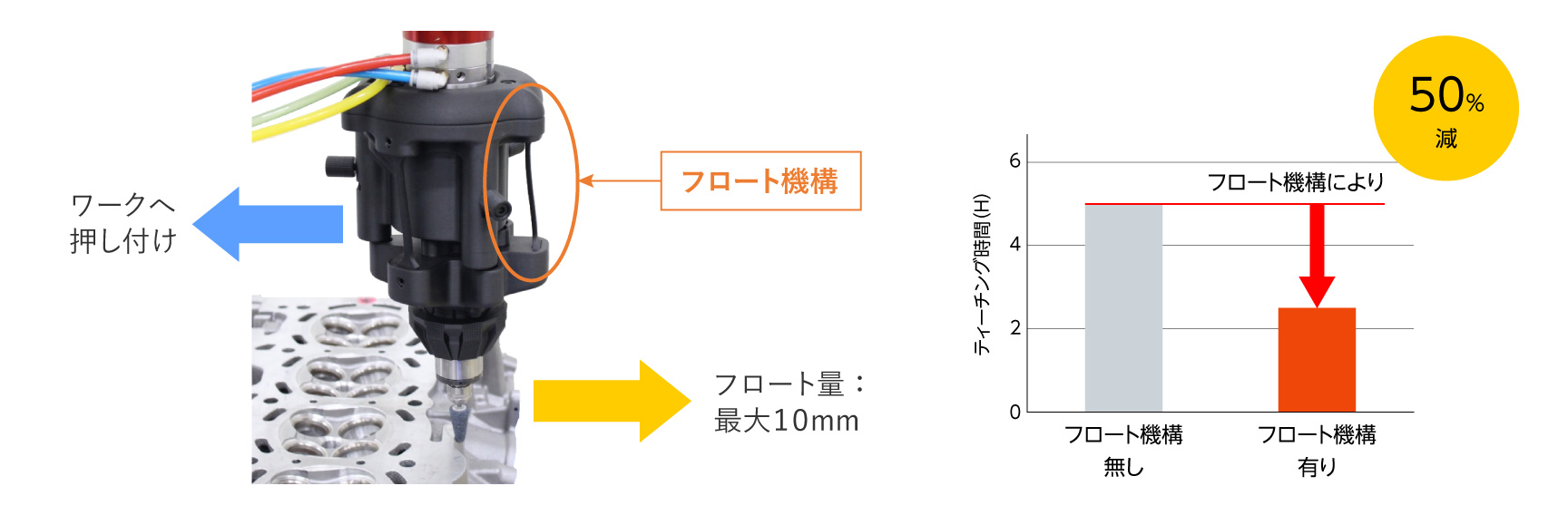
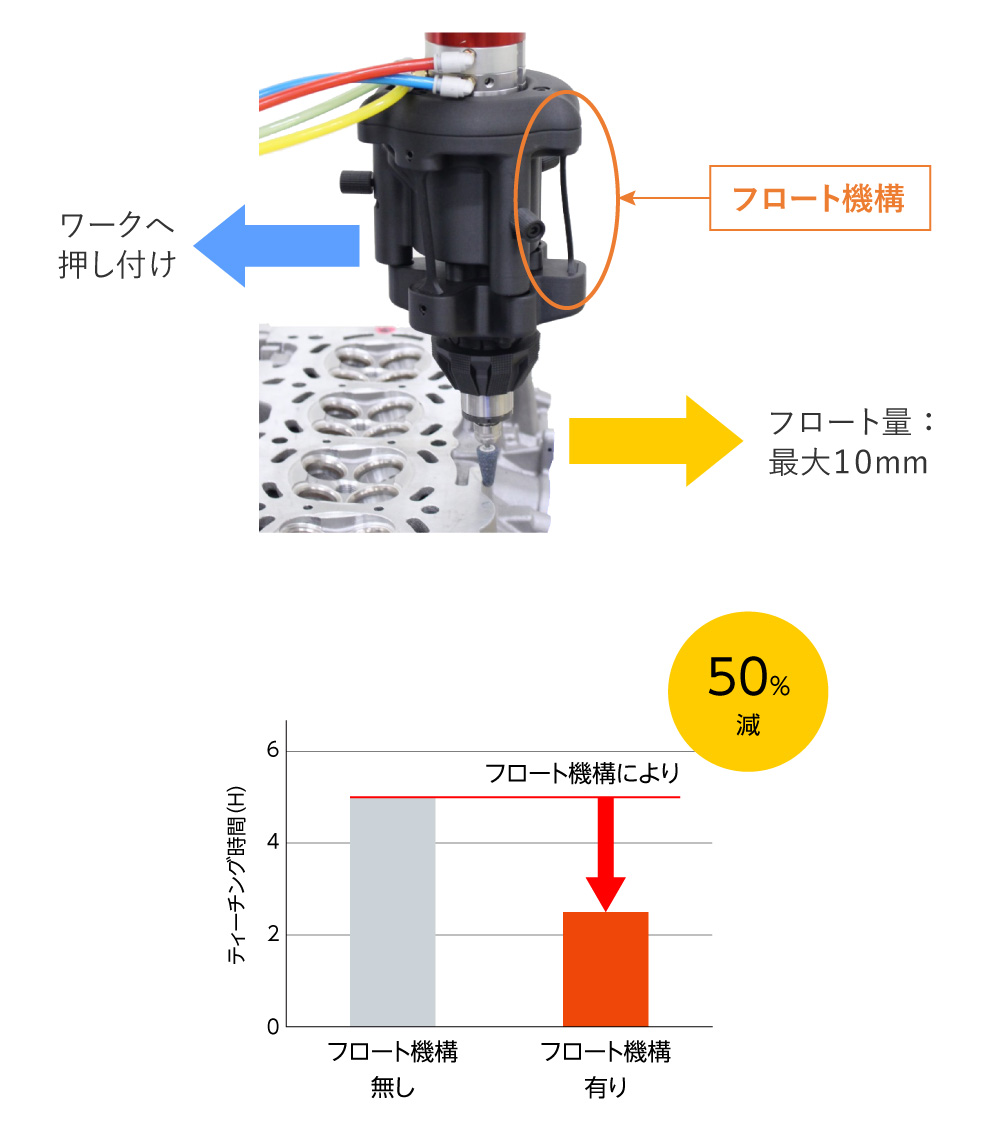
高フロートによりティーチングに
要する時間を大幅に削減
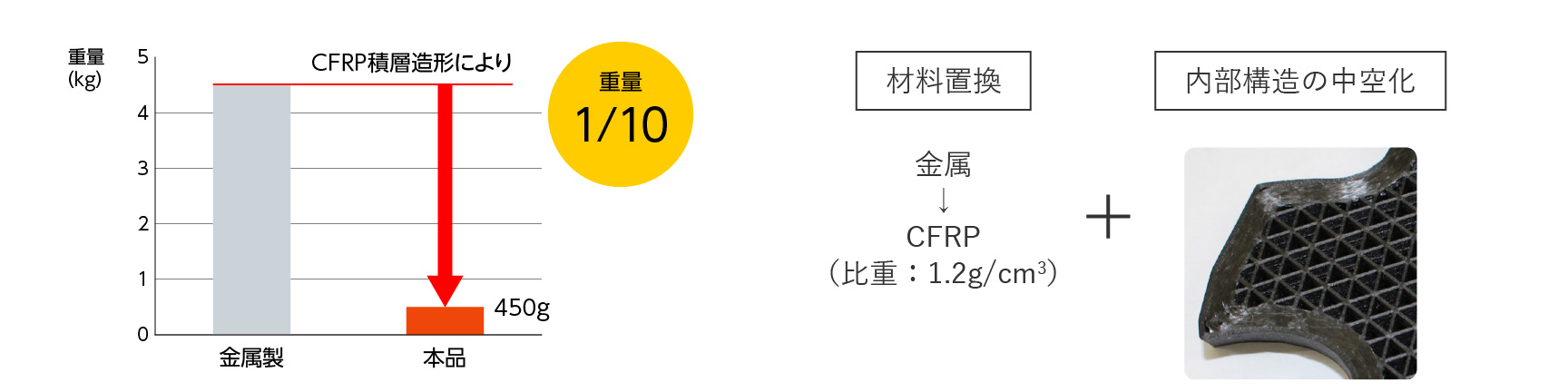
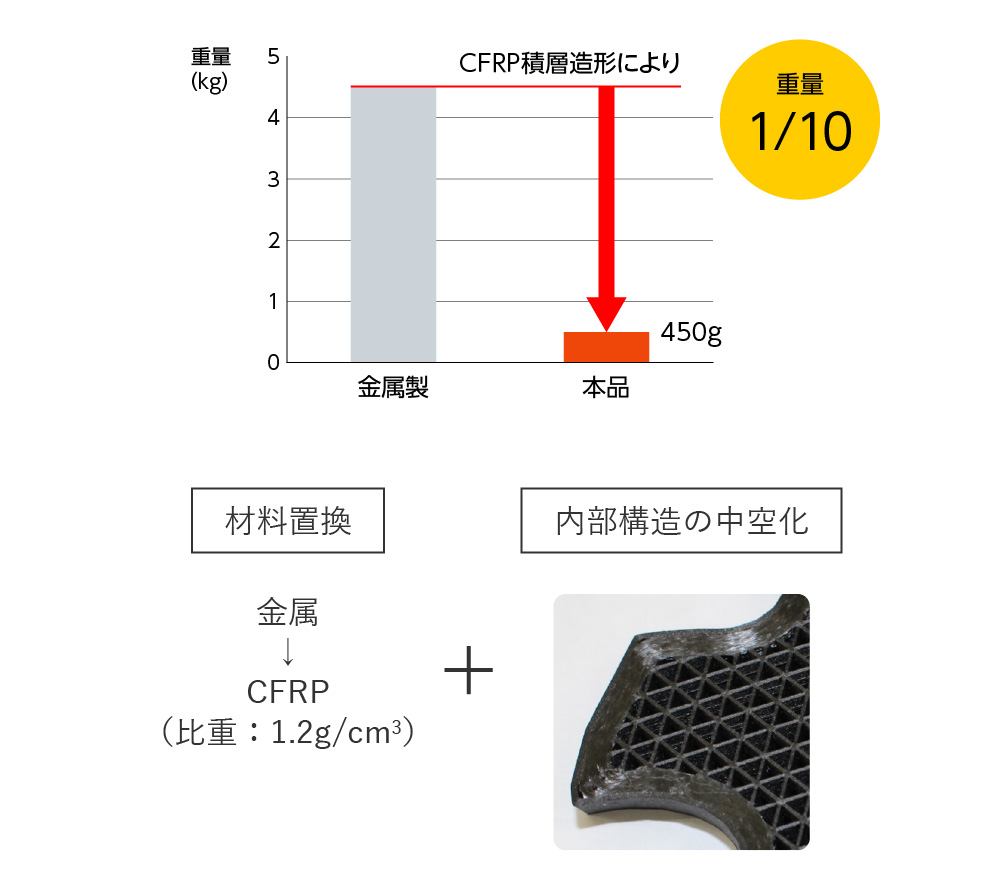
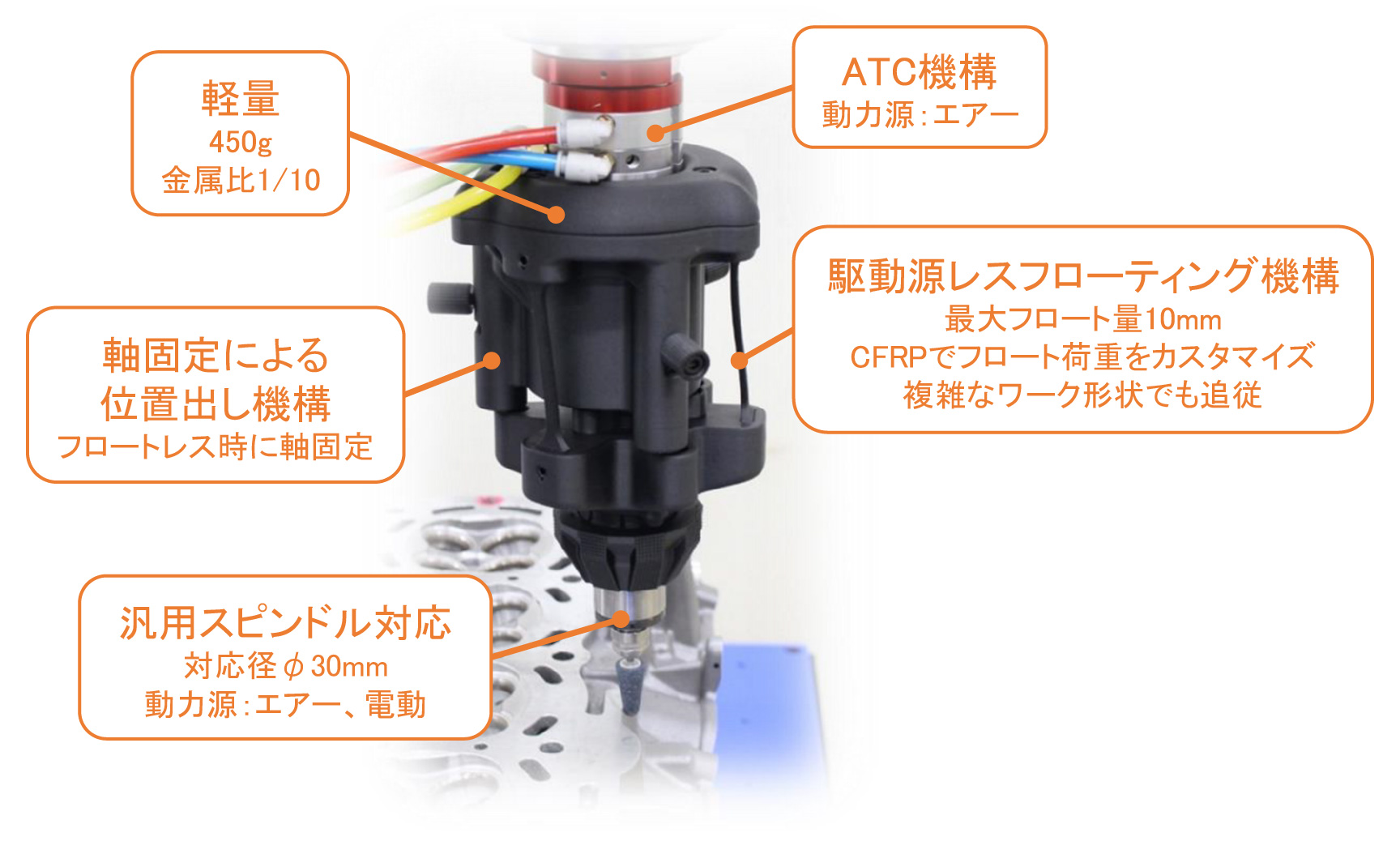
- CFRPの積層造形で軽量・高強度なボディと高フロート機能を実現
- ティーチングを容易にする協働ロボット用バリ取りハンド
- 高フロート量で複雑ワークにも追従し、安定してバリを除去
- 軽量ボディで可搬重量が小さいロボットアームにも対応
- CFRPの特性を活かしたフロート機構は駆動源が不要
“ココがうれ&スゴっ!”
── 嬉しい!凄い!アイデアと技術のご紹介 ──
フローティング式バリ取りハンドは、バリ取りツールを把持するための協働ロボット用ハンド。
構成部品はCFRPの積層造形品を採用、高い強度重量比を有し、かつ従来の加工方法では製作不可能な自由形状が製作可能となり、軽量・高強度なボディと駆動源が不要な高フロート機構を持つ。
複雑なワークでも追従し安定してバリを除去することが可能で、ティーチングに要する時間を大幅に削減する。
ココがポイント!
CFRP採用と内部中空化で軽量化Excellent !
ココがポイント!
CFRPの弾性を利用したフロート機構で複雑なワークにも追従Excellent !
開発コンセプト/製品コンセプト
「現状と課題」
- スマートファクトリー化やカーボンニュートラル推進により、製造現場では省人化・省資源・省エネルギー化などが求められており、ロボット導入による自動化がこれらの解決策の1つとなっている。
しかしながら、“ロボット導入=即自動化”が実現できるわけではなく、ロボットを作業者の代わりとして作業させるためには、ハンドを選定しロボットに動作を教示する必要がある。 - ハンドはロボットの可搬重量制約を受けるため軽量化が求められており、また導入においてはティーチング技術を持つ人材の確保やティーチングに要する時間の削減が求められている。
- バリ取り工程においても自動化のニーズが高まっている中、最小限のティーチングでも複雑な形状のワークに追従する機能が求められている。
「開発のポイント」
- 「フローティング式バリ取りハンド」は、構成部品にCFRPの積層造形品を採用し、軽量・高強度なボディとともに従来の加工方法では製作不可能な自由形状が製作可能に。
- ロボットアーム選定時に可搬重量を気にする必要が無く、複雑なワークでも追従し安定してバリを除去することが可能で、ティーチングに要する時間を大幅に削減する。
- CFRPの特性を活かした高フロート機構は駆動源が不要でかつワークに合わせて最適なフロート力に調整することができる。
製品仕様
- ※掲載品の仕様のため参考値
目的・用途に合わせて特殊設計製作が可能
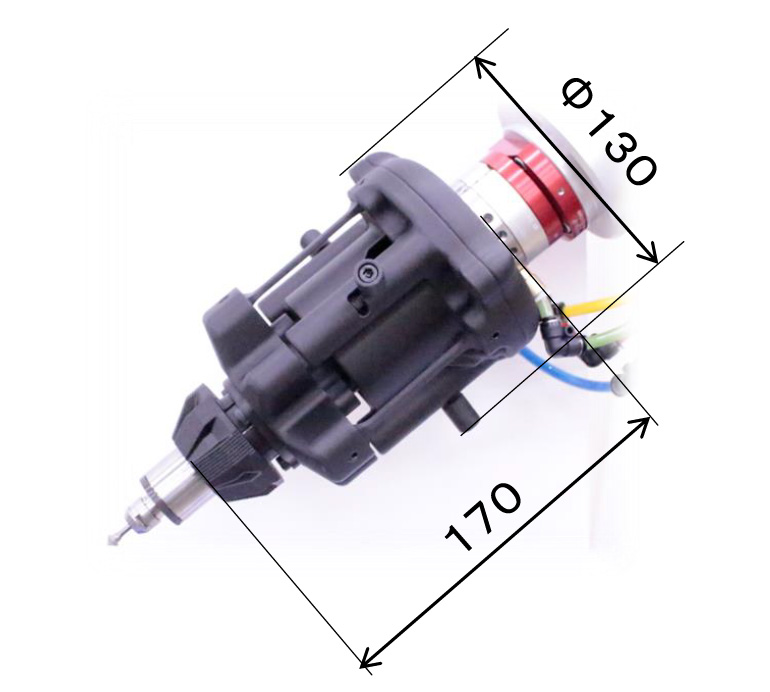
| サイズ(mm) | 図中に記載 |
|---|---|
| 重量(g) | 450※ |
| 最大フロート量 (mm) |
10 |
| 対応スピンドル径 (mm) | ø30 |
- ※スピンドル、ツールチェンジャー等の部品を除いた値


