搬送ハンド
小型ロボット対応 超軽量ハンド
- 「軽量素材」+「造形技術」でワークにフィットするハンド形状を実現
- 軽量化と自由度を追求した搬送ハンド
- 軽量ボディで可搬重量が小さいロボットアームにも対応
- ワークに合わせてハンド形状をカスタマイズ
“ココがうれ&スゴっ!”
── 嬉しい!凄い!アイデアと技術のご紹介 ──
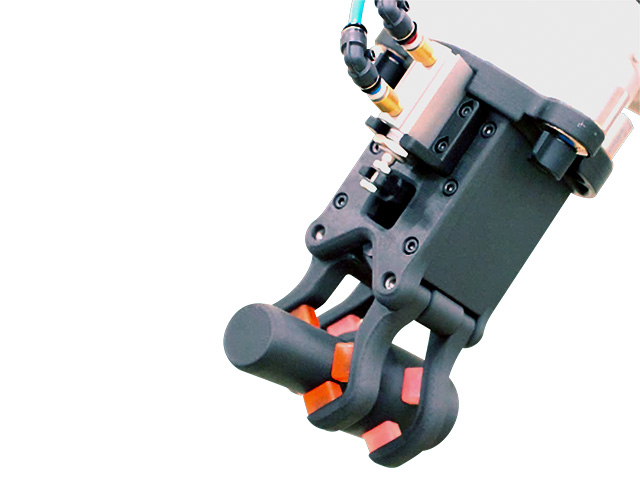
搬送ハンドは、多種多様なワークを搬送するための協働ロボット用搬送ハンド。
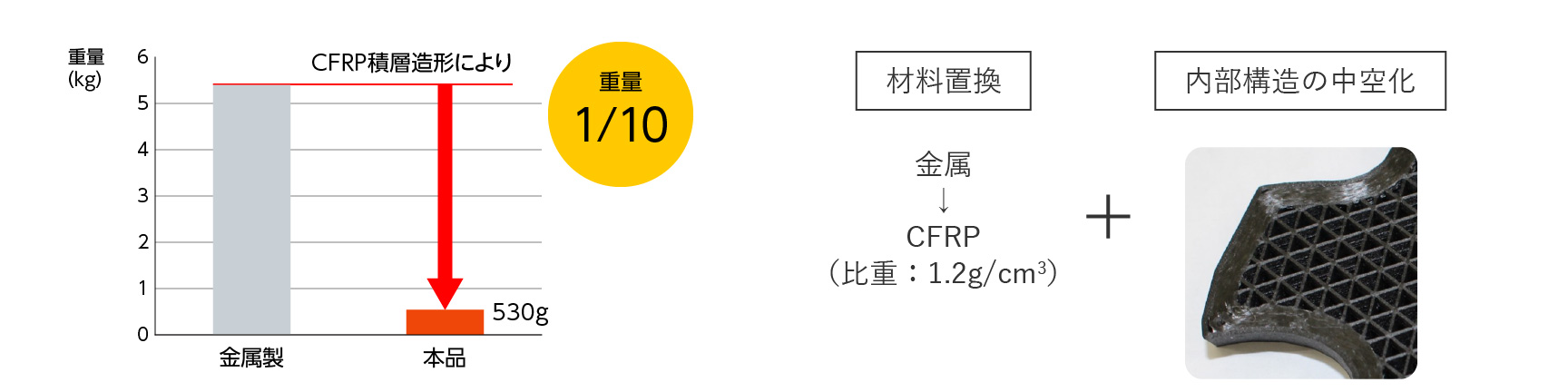
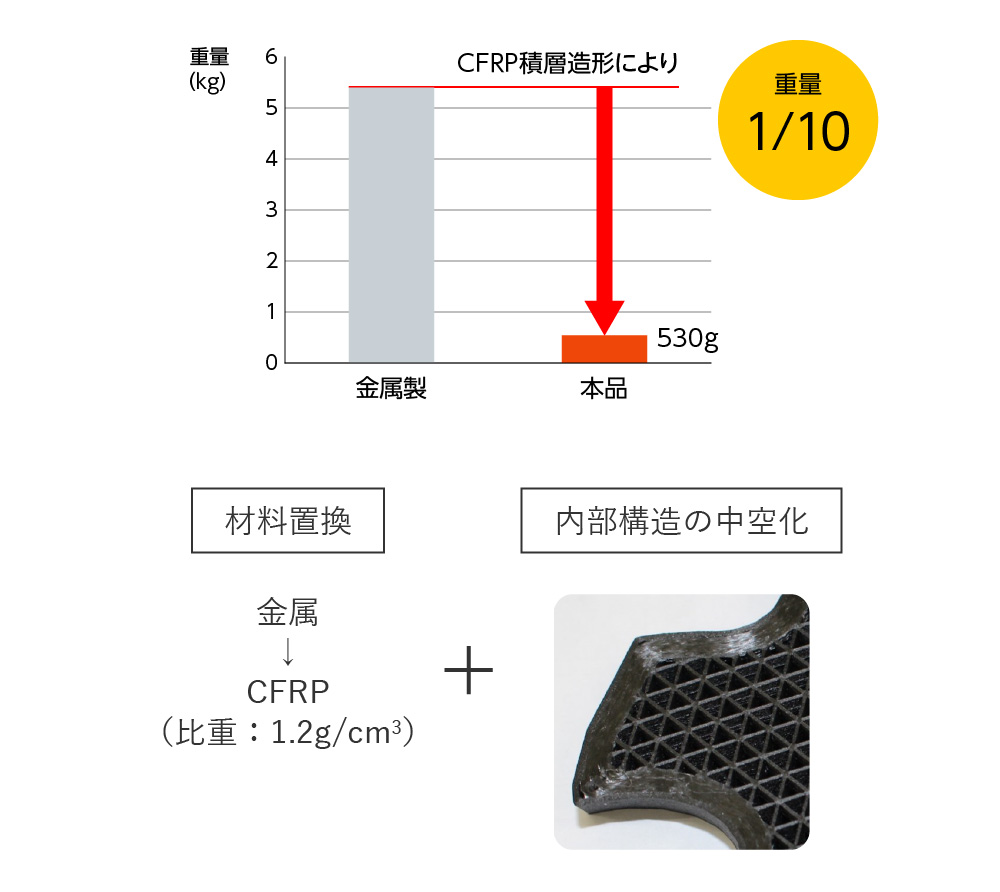
構成部品にはCFRPの積層造形品を採用。
高い強度重量比を有し、従来の加工方法では製作不可能な自由形状が製作可能に。
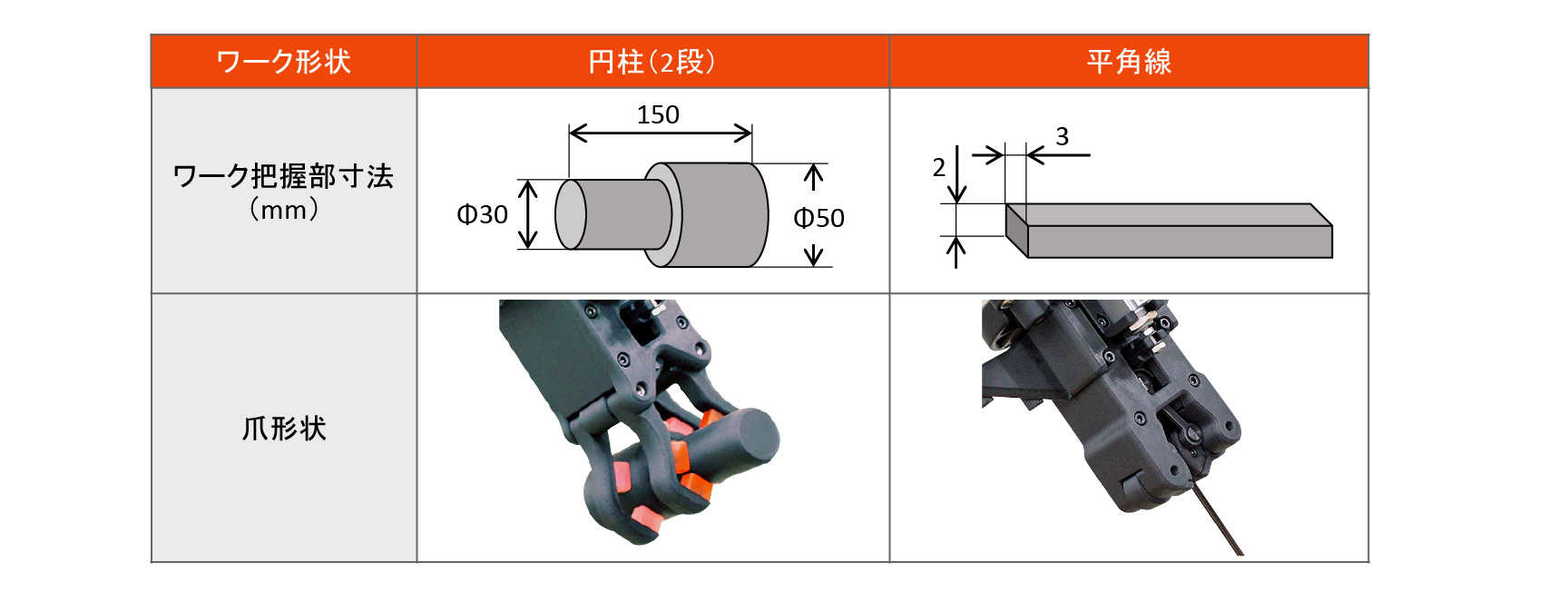
軽量・高強度なボディとともに、ハンド形状はワークに合わせて自由自在にカスタマイズが可能。
多種多様なワーク搬送の自動化を実現する。
ココがポイント!
CFRP採用と内部中空化で軽量化Excellent !
ココがポイント!
ハンド形状のカスタマイズにより、多種多様なワーク形状に対応Excellent !
開発コンセプト/製品コンセプト
「現状と課題」
- スマートファクトリー化やカーボンニュートラル推進によって、製造現場では省人化・省資源・省エネルギー化などが求められており、ロボット導入による自動化がこれらの解決策の1つとなっている。
- ワーク搬送においても自動化のニーズが高まっており、ハンドはロボットの可搬重量制約により軽さが重視されると同時に、多種多様なワークを把持し目的に応じた姿勢や位置へ搬送する機能性が求められている。
「開発のポイント」
- 「搬送ハンド」は、構成部品にCFRPの積層造形品を採用し、軽量・高強度なボディとともに従来の加工方法では製作不可能な自由形状が製作可能に。ハンド形状もワークに合わせて自由自在にカスタマイズが可能。
- 金属製ハンドと比べて超軽量のため、同じロボットアームを使用した場合、より重たいワークの搬送が可能。
製品仕様
- ※掲載品の仕様のため参考値
目的・用途に合わせて特殊設計製作が可能

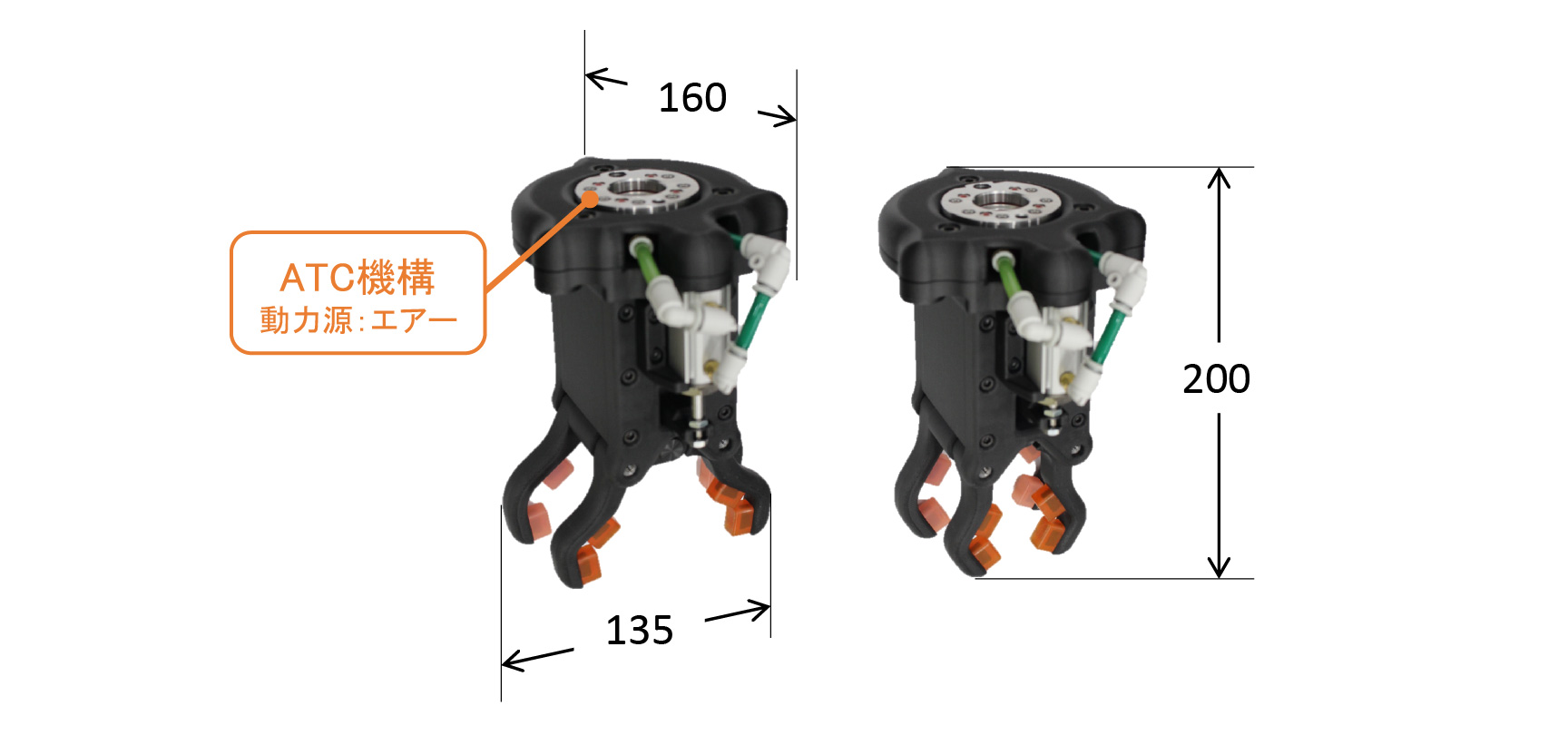
| サイズ(mm) | 図中に記載 |
|---|---|
| 重量(g) | 530※1 |
| 把握動力源 | エアー(0.4MPa) |
| 把握力(N) | 16※2 |
| 対象ワーク形状(mm) | 図中に記載 |
- ※1 ツールチェンジャー等の部品を除いた値
- ※2 圧力0.4MPaでの机上計算値(実験評価値ではない)


