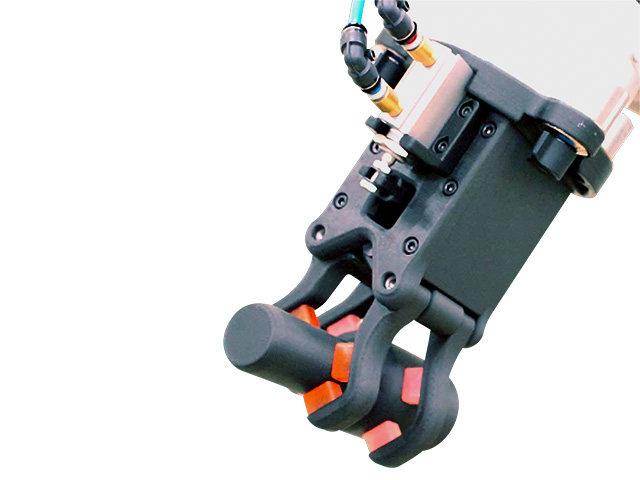
Transfer Hand
Ultra-light weight hand for small robots
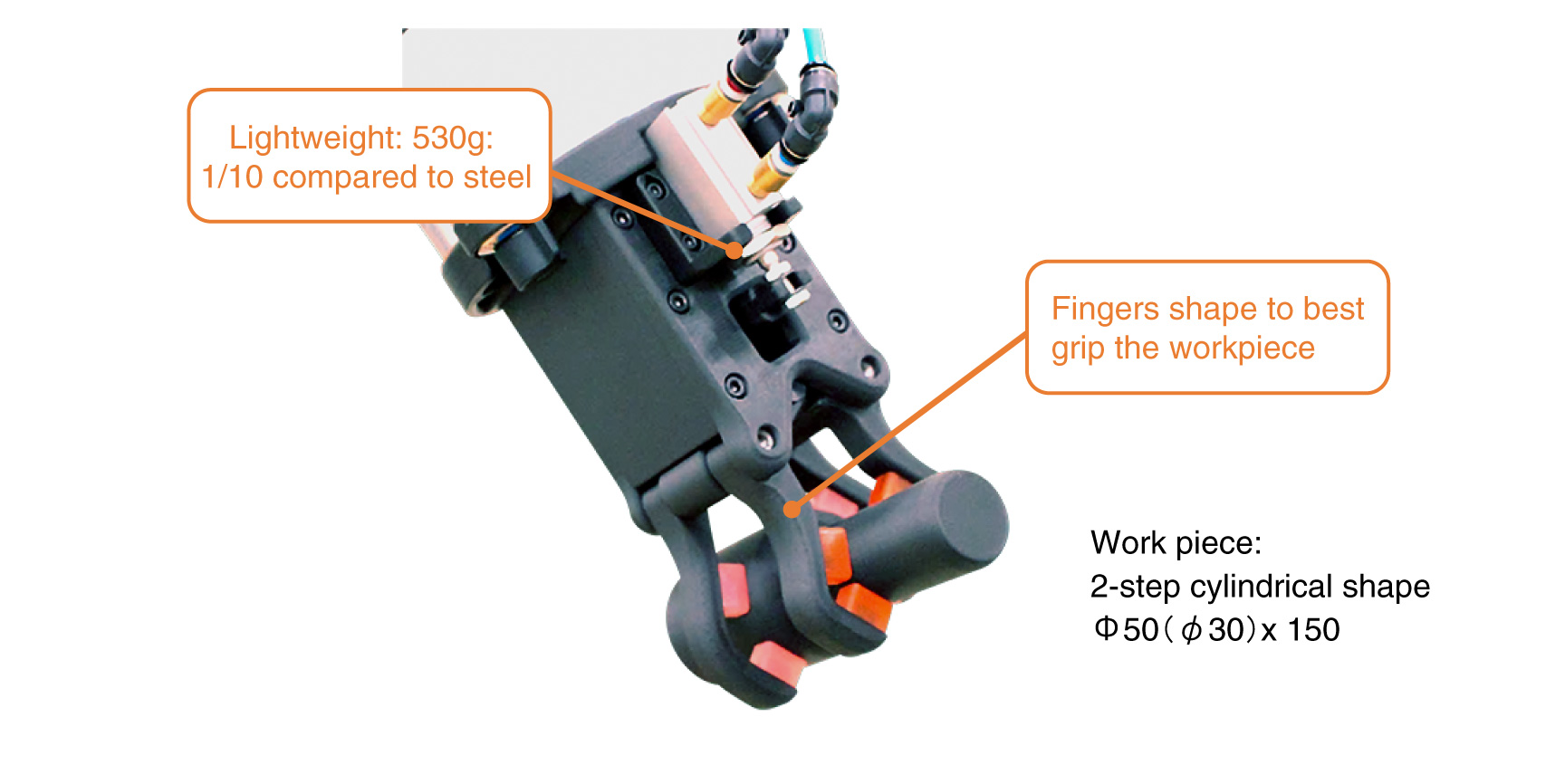
- “Lightweight materials” and “Molding technology” have been combined to create a hand shape that fits the workpiece
- Conveyance hand pursuing lightweight design and freedom of design
- The lightweight body also supports small robot arms with low payload.
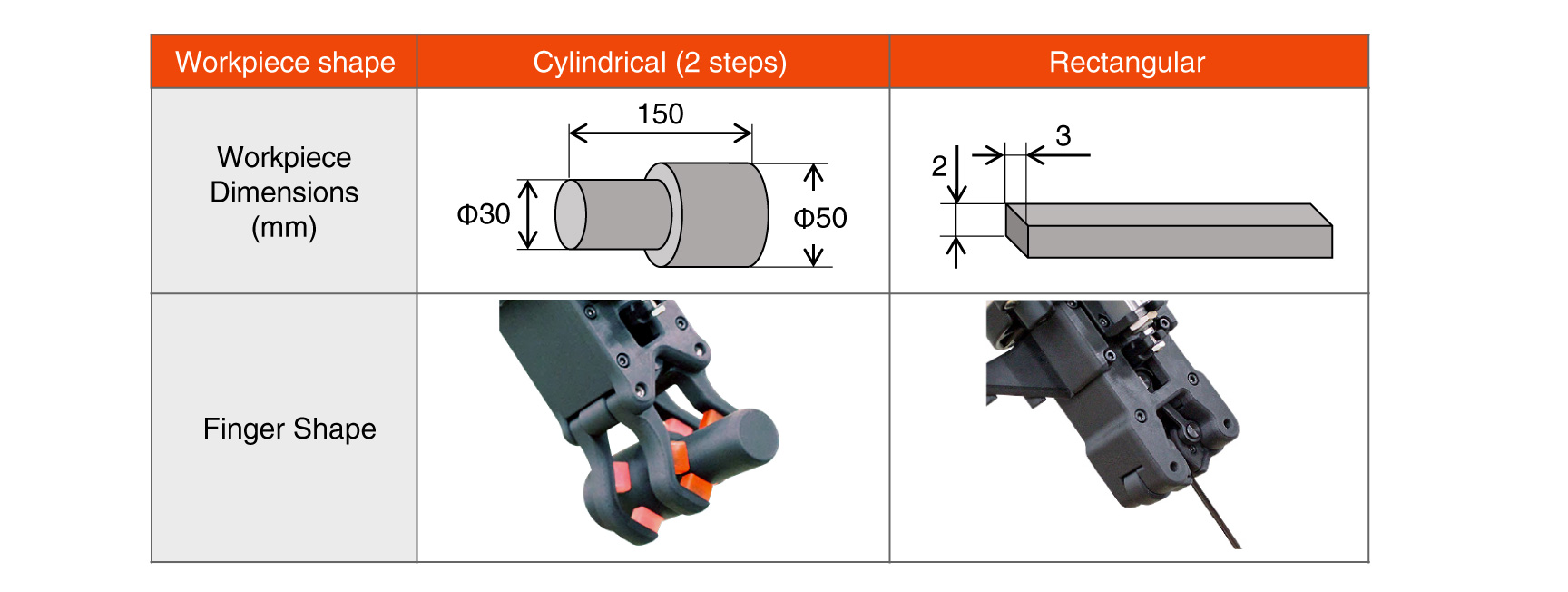
- Customized hand shape to match the workpiece.
“Amazing Ideas / Facts!”
The “Transfer Hand”, with collaborative robots, realizes automatic transfer of a wide variety of workpieces.
- The main components are made of additively manufactured CFRP.
- It has a high strength-to-weight ratio, and can be manufactured into free shapes that are impossible with conventional processing methods.
- As well as lightweight, high-strength body, the hand can be freely customized according to workpiece specifications.
POINT!
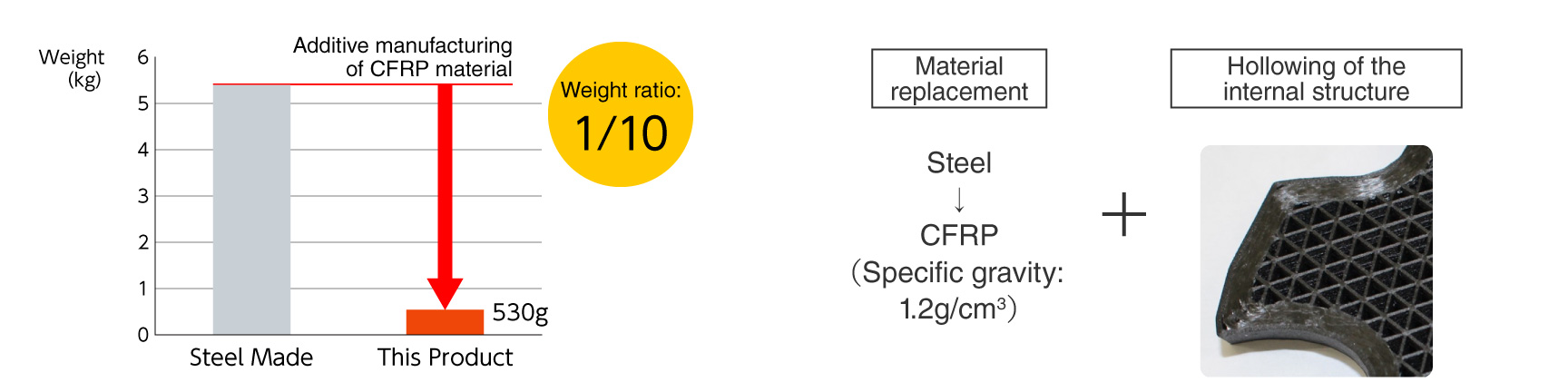
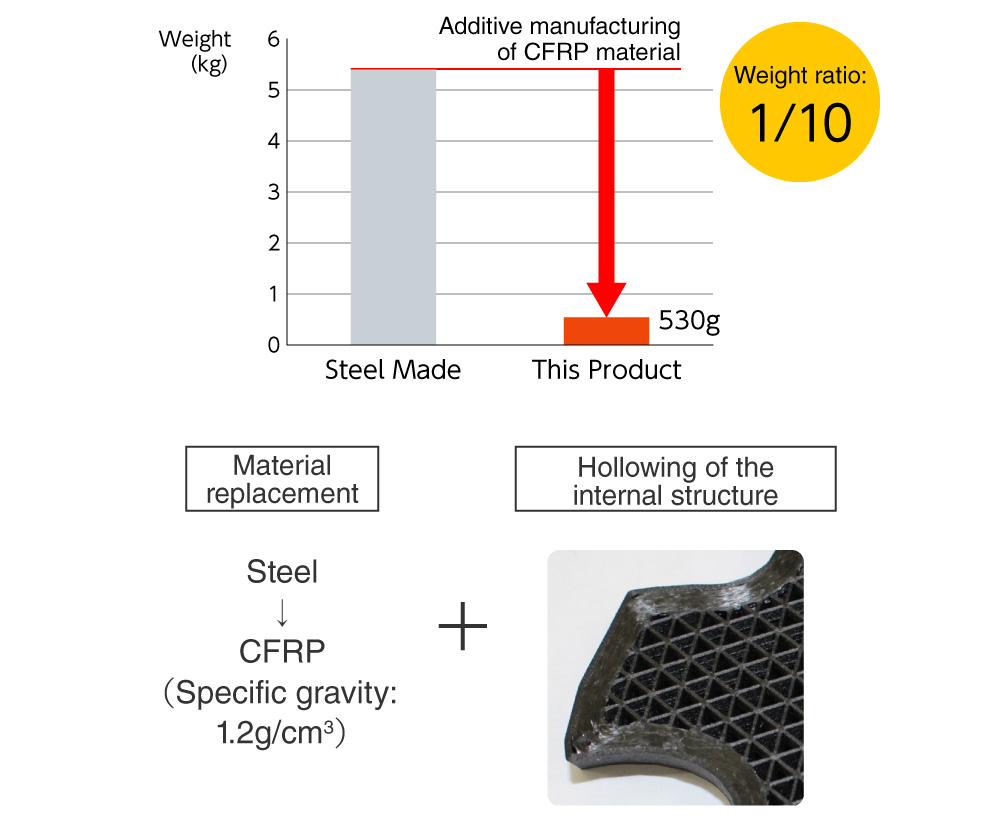
Ultra-light weight due to the use of CFRP material and hollow interior.Excellent !
POINT!
Compatible with a wide variety of workpiece shapes by the customized hand shape.Excellent !
Background / Point for Development
Background
- With the promotion of smart factories and carbon neutrality, manufacturing sites are required to save labor, resources, and energy, and automation through the introduction of robots is one of the solutions.
- As the need for automation in workpiece transportation increases, lightweight construction has become an important factor as the robots max. payloads are limited. While the gripping capacity of a wide variety of workpieces and the transporting capacity in the desired posture and position are more and more required.
Point for Development
- By using CFRP additive manufacturing for its component parts, the transfer hand has a lightweight, highly rigid body and is a free-form product that cannot be manufactured using conventional methods.
- Because it is extremely light compared to steel hands, the payload capacity can be increased when using the same robot arm.
Product Specification
- *For reference:
Special designs and production according to the purpose and use are possible.
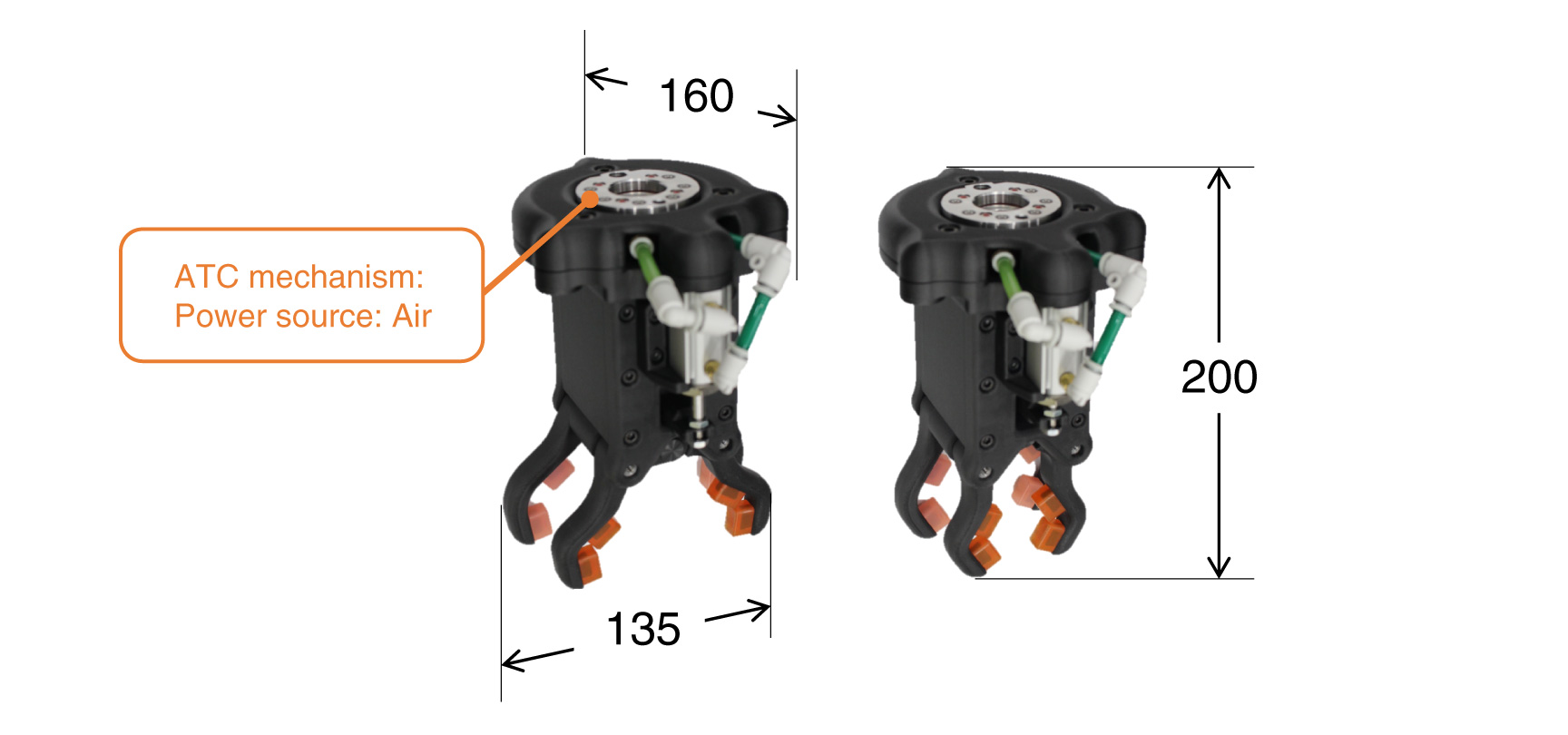
| Size | See diagram (mm) |
|---|---|
| Weight | 530g*1 |
| Gripping Power Source | Air (0.4 MPa) |
| Gripping Force | 16 N*2 |
| Workpiece shape | See diagram (mm) |
- *1Excluding steel parts such as tool changer.
- *2Calculated value at gripping pressure 0.4Mpa.
(not experimental evaluation value)


